تحلیل لرزش و ارتعاش در ماشین های دوار
با توجه به نقش ماشین آلات در صنایع نفت و گاز، روش های پایش و آنالیز وضعیت کارکرد آنها از اهمیت ویژه ای برخوردار است. یکی از این روش ها تحلیل لرزش است.
از آنجایی که حالات های خرابی دارای مشخصه ی فرکانسی متفاوتی هستند که میتوان آنها را از هم جدا و شناسایی کرد از این رو ارزیابی پارامتر لرزش نسبت به روش های دیگر کارایی بیشتری داشته و در این مقاله از سایت دوار ماشین پارس مورد بحث قرار می گیرد .
همان طوری که میدانید تمامی ماشین های دوار دارای ارتعاش هستند، و این ارتعاش ها حدود استانداردی دارند . بروز عیوب مختلف در ماشین آلات یا عدم رعایت مقادیر مجاز و استاندارد در کارهای تعمیراتی باعث میشود .
مقدار ارتعاش افزایش یافته و به تبع آن قطعات دچار خرابی شوند و خسارات جبران ناپذیری را به وجود آورند. برای هر پدیده علتی است و هر علتی را معلولی، و
برخی از علل ایجاد ارتعاش در ماشین آلات عبارتند از :
- ناهم محوری اجزا ( کوپلینگ ها )
- نابالانسی قطعات ماشین
- عدم فونداسیون مناسب جهت استقرار تجهیزات ( الکتروموتور های بزرگ )
- خوردگی و فرسایش قطعات
- لق شدن پیچ و مهره ها و اجزای نگهدارنده ی ماشین در محل استقرار خود
- وجود هارمونیک های فرد به دلایل مختلف از جمله پایین بودن کیفیت تأمین و توان انرژی الکتریکی
- عدم بهره برداری صحیح از دستگاه
ارتعاش
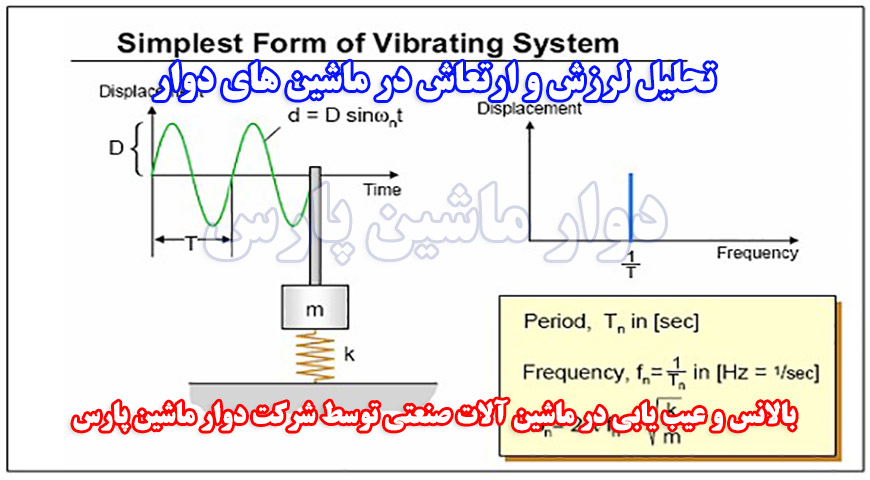
ارتعاش به نوعی از حرکت سامانه های دینامیکی اطلاق میشود که به صورت نوسانی صورت پذیرفته و حرکت در یک پریود زمانی تکرار شود. به عبارت ساده تر ارتعاش ، نوسان مکانیکی نسبت به یک موقعیت مرجع است،که مقدار آن بیانگر پارامتری از حرکت یک سامانه ی مکانیکی است.
این نوع حرکت را در ساده ترین شکل میتوان با یک جرم و یک فنر شبیه سازی کرد. با القای یک تغییر مکان اولیه به جرم متصل به فنر و رها کردن آن، حرکت نوسانی رخ میدهد که میتوان دامنه آن را به کمک یک تابع سینوسی بیان نمود
x=asin(ωt+φ)
شکل ۱ حرکت جرم و فنر
ویژگی های مهم حرکت ارتعاشی عبارتند از :
دامنه ، که معیاری از شدت ارتعاش است. از اشکالی که برای بیان دامنه بکار می رود میتوان به مقدار دامنه و اندازه مؤثر اشاره کرد .
مقدار دامنه برای مشخص کردن سطح شوک های کوتاه مدت مناسب می باشد؛ اما سابقه زمانی موج به حساب نمی آید. وقتی خرابی های کوچکی روی ساچمه ، غلتک و شیارهای خارجی و داخلی یاتاقان ها ایجااد میشود پالس های ارتعاشی فرکانس بالایی ایجادمیشود که به وسیله آشکارساز دامنه آشکار میشوند
در مراحل اولیه خرابی، این ارتعاشات به وجود آمده،انرژی بالایی ندارند و شاخص انرژی ارتعااش (RMS) تغییر قابل ملاحظه ای نمیکند ولی دامنه به اندازه کافی افزایش می یابد.
مقدار مؤثر شاخص انرژی ارتعاش (RMS) جذر مجموع مربعات مقادیر دامنه های مستقل می باشد :

نسبت ۰٫۷۰۷ بین RMS ودامنه تنها در موج سینوسی ساده صادق است و در موج های پیچیده صدق نمیکند. به عبارت دیگر RMS میانگین گیری دامنه ی خطوط یک طیف مستقل در طی مدت زمان معین است . شاخص انرژی ارتعاش یا RMS رایج ترین اندازه گیری دامنه است؛ زیرا هم سابقه زمانی موج را به حساب می آورد و هم مقدار دامنه ای که مستقیماً مرتبط با مقدار انرژی است را به دست میدهد و بنابراین قابلیت مخرب بودن ارتعاش را نشان خواهد داد. هر تغییری در ارتعااش، باعاث تغییر در RMS به طور مشخص می شود ، اما تغییر Peak-to-Peak قاب پیش بینی نیست.
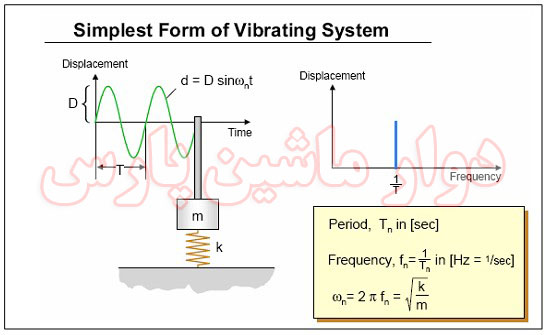
فرکانس، که معیاری از نرخ حرکت در واحد زمان است :
Frequency=1/T (In Cycle per Second or Hertz)
فرکانس به شکل دیگر هم نشان داده میشود :
دور بر دقیقه = RPM=60 x Freq.(Hz)
فاز، که توالی حرکت را نسبت به یک مرجع مشخص می سنجد . اگر ارتعاش در فواص زمانی معینی اتفاق بیفتد آن را لرزش متناوب می گویند . ارتعاشات متناوب در دو حوزه زمانی (یعنی در طول مدت زمان تناوب) و حوزه فرکانسی نمایش داده میشود. در عمل به دلیل امکان بررسی اجزای و مقادیر لرزش در فرکانسهای مختلف ارتعاشات را در حوزه فرکانس نشان می دهند که اصطلاحاً به آن طیف لرزش می گویند .
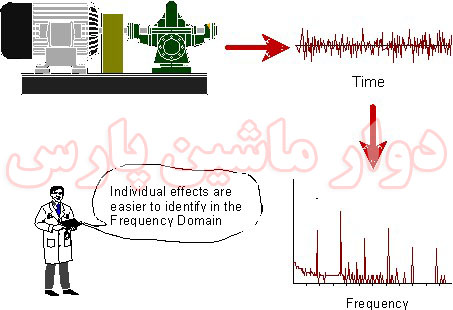
شکل ۲ نمایش ارتعاشات متناوب در حوزه زمان و حوزه فرکانس
ارتعاش های هارمونیک
بر اساس بسط سری فوریه ،هر موج متناوب را میتوان به یک سری از ارتعاش های هارمونیک با دامنه و فاز مستقل تجزیه کرد . این اصلی است که برای تبدیل سیگنال ها از حوزه ی زمان به حوزه فرکانس استفاده می گردد و به همین دلیل منحنی فرکانس (طیف فرکانسی) سیگنال لرزش را FFT6 نیز می نامند . معمولاً ارتعاش اندازه گیری شده از روی ماشین، یک سیگنال پیچیده و ترکیبی از چندین سیگنال ارتعاشی با فرکانس های مختلف است .
تحلیل فرکانسی که به آن آنالیز FFT یا اسپکتروم نیز گفته میشود، یک فرآیند پردازش سیگنال است که به کمک آن محتوای فرکانسی سیگنال ارتعاشی به دست می آید . برای به دست آوردن منحنی طیف فرکانسی از الگوریتم FFT یا تبدیل فوریه سریع استفاده میگردد . به همین دلیل به منحنی فرکانسی گاهی اوقات منحنی FFT نیز گفته میشود .
در منحنی های FFT ، محور افقی فرکانس و محور عمودی دامنه ارتعاش را نشان میدهد. همانطور که گفته شد، در بسیاری از عیوب، فرکانس ارتعاش ایجاد شده با دور ماشین ارتباط دارد و در واقع هارمونیک ها و یا به عبارت دیگر مضرب صحیحی از دور ماشین در منحنی FFT دیده میشود. این مضرب را به شکل های ۱xRPM ،۲xRPM ،۳xRPMو . . . نشان می دهند .
آنالیز فرکانسی و جداول عیب یابی
- برای آن که تحلیل گر بتواند از طیف فرکانس برداشت درستی داشته باشد لازم است برای سؤالات زیر پاسخ مناسبی پیدا کند :
- در چه فرکانس هایی لرزش زیاد است و رابطه فرکانس ها با دور ماشین چیست (آیا فرکانس یک برابر، دو برابر و یا ضریبی از دور ماشین است)؟
- حداکثر لرزش اندازه گیری شده در هر فرکانس چقدر است؟
- رابطه فرکانس های با دامنه ی زیاد با یکدیگر چگونه است؟
- آیا لرزش در دو برابر دور بیش از لرزش در یک برابر دور است؟
- دامنه ی ارتعاش در چه فرکانسی زیاد است؟ …
مهمترین کار در فرآیند ارتعاش سنجی و آنالیز، تخصیص دادن فرکانس های مختلف در طیف ارتعاشی به اجزا و قطعات مختلف ماشین یا به عیوب متفاوت است. برای راحتی کار جداول عیب یابی تهیه شده است که میتوان برای آنالیز فرکانسی از آنها استفاده کرد .
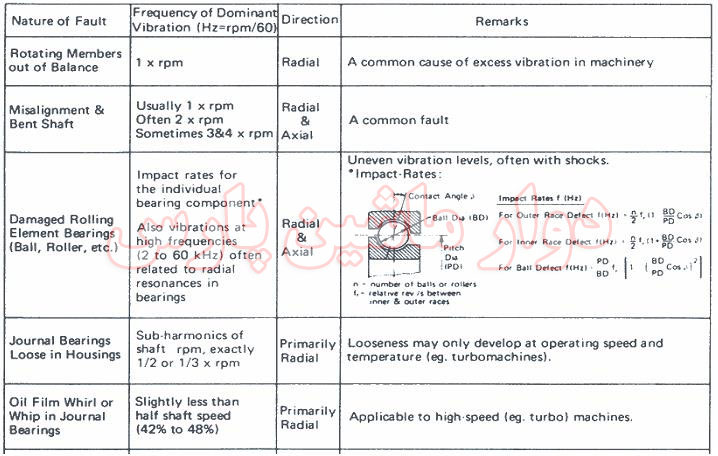
جدول (۱) جدول عیب یابی
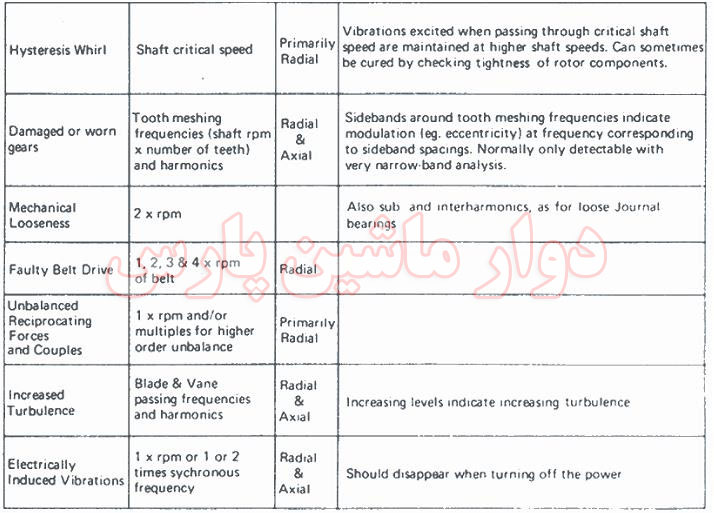
جدول (۲) جدول عیب یابی
ارتعاش در ماشین آلات دوار
به طور کلی دو نوع نیروی استاتیکی و دینامیکی در ماشین آلات وجود دارد . ارتعاش نتیجه ی نیرو های دینامیکی ماشین هایی است که قطعات متحرک دارند . البته قطعات مختلف ماشین با فرکانس ها و دامنه های مختلفی ارتعاش می کنند که بر اثر وجود خرابی از مقادیر مجاز تجاوز میکنند . برخی از زمینه های بروز لرزش (اختلاف از حالت ایده آل) عبارتند از :
– اشکال در نصب اولیه
– اشکالات بهره برداری
– بروز اشکالات در حین تعمیرات
از آنجایی که رسیدن به حالت ایده آل امکان پذیر نیست، همیشه تا حدی ارتعاش در ماشین آلات وجود دارد که مجاز شمرده میشود. اما با گذشت زمان و بر اثر بروز اشکالات بعدی، بعضاً ارتعاشات نسبت به حد مجاز افزایش می یابد که با آنالیز و انجام اقدام اصلاحی مناسب، میتوان وضعیت را به حالت قبل برگرداند .
رابطه زیر میزان ارتعاش ماشین را تعیین میکند
Vibration = Vibratory Force / Impedance
همان طوری که در بالا به آن اشاره شد نیرو های ارتعاش زا در داخل ماشین و معمولاً توسط بخش در حال دوران تولید می شوند مانند :
- نیروهای الکترومغناطیسی
- تماس قطعات متحرک و ثابت
- اصطکاک
امپدانس از مشخصات هر سامانه ی مکانیکی و از جمله ماشین آلات دوار است و مسیر انتقال ارتعاش را توصیف میکند. مقاومت مکانیکی در برابر حرکت، از ویژگی های هر سامانه ی مکانیکی است . برخی عوام بدون اینکه از خود نیرویی تولید کنند و تنها از طریق تأثیر بر امپدانس، منجر به تشدید ارتعاش میشوند.
مهمترین آنها عبارتند از :
- لقی مکانیکی
- تحریک فرکانس های طبیعی اجزا
- ضعف در فونداسیون و یا شاسی ماشین آلات
- ضعیف بودن سازه
به طور کلی با توجه به مکانیزم کاری ، ارتعاشات مکانیکی در قالب سه نوع اندازه گیری میشود :
ارتعاشات مکانیکی
جابجایی ارتعاش : عبارت است از میزان انحراف نقطه ی اندازه گیری شده از موقعیت سکون اولیه خود ؛ واحد اندازه گیری آن در استاندارد های صنعتی میلیمتر و یا میلز می باشد . این نوع لرزش توسط حسگرهای از نوع جریان گردابی اندازه گیری میشود .
سرعت ارتعات : عبارت است از میزان سرعت حرکت نقطه اندازه گیری شده حاول نقطه موقعیت سکون اولیه ؛ واحد اندازه گیری آن در اساتاندارد های صنعتی mm/sec و یا inch/sec می باشد .
شتاب ارتعاش : عبارت است از میزان شاتاب حرکتی نقطه اندازه گیری شده حاول نقطه سکون اولیه ؛ واحد اندازه گیری آن در استاندارد های صنعتی ۲mm/sec و یا g17 می باشد . اگر فرض کنیم که لرزش یک سیگنال هارمونیک ساده باشد می توانیم روابط زیر را بنویسیم :
Displacement : x=asin ωt Velocity : v=dx/dt = AωCosωt Acceleration : a = dv/dt = -Aω Sin ωt
فرکانس ارتعاش = f دامنه جابجایی A = دامنه سرعت (Velocity amplitude) A = دامنه شتاب Aω (Acceleration amplitude) =
با توجه به روابط بالا میتوانیم بنویسیم :
Displacement amplitude= Velovity/ω; Acceleration amplitude = Velocity * ω
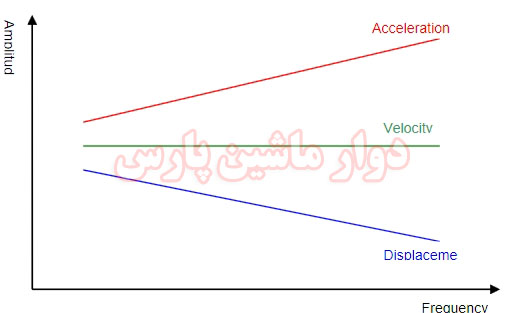
شکل ۲ تغییرات دامنه و فرکانس
با توجه به شکل ۲ نتایج زیر حاصل می شود :
- تغییرات دامنه سرعت در محدود های از فرکانس یک خط راست است .
- میزان دامنه شتاب با افزایش فرکانس افزایش می یابد،به عبارت دیگر میزان لرزش شتاب در فرکانس های پایین تضعیف می شود و از این رو میتوان گفت که اندازه گیری شتاب برای فرکانس های پایین اطلاعات کاملی برای تحلیل ارایه نمیدهد .
- میزان دامنه لرزش جابجایی در فرکانس های بالا تضعیف میشود. از اینرو میتوان گفت که اندازه گیری لرزش جابجایی برای فرکانس های بالا اطلاعات کاملی برای تحلیل ارایه نمی دهد .
۲ – انواع ارتعاش
معمولاً در ماشین آلات دوار دو نوع یاتاقان مورد استفاده قرار میگیرد : یاتاقان غلتشی / لغزشی و یاتاقان ژورنال .
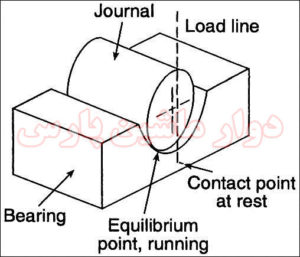
شکل ۴ یاتاقان ژورنال
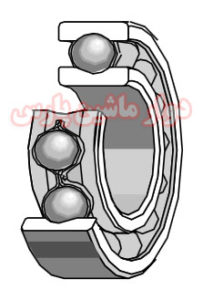
شکل ۳ یاتاقان غلتشی
نیروها و ارتعاشات به وسیله اجزای غلتشی در یاتاقان های غلتشی (ضد اصطکاکی) یا فیلم روغن در یاتاقان های ژورنال به محفظه های یاتاقان ها و از آنجا به فونداسیون ماشین منتقل می گردد .
معمولاً سه نوع لرزش روی ماشین ها اندازه گیری می گردد :
- ارتعاشات مطلق یاتاقان : عبارت است از حرکات بدنه / پوسته نسبت به یک نقطه ثابت در فضا . در این حالت ،میزان لرزش یاتاقان یا تا آنجا که ممکن است به یاتاقان ها نزدیک باشد اندازه گیری می شود و معمولاً توسط حسگرهای لرزش سرعت و شتاب اندازه گیری می شود .
- ارتعاشات نسبی محور : عبارت است از حرکات محور دوران نسبت به محلی که المان اندازه گیری نصب شده است . این ارتعاش در ماشین هایی که دارای یاتاقان های ژورنال هستند کاربری دارد.
وجود لایه روغن بین محور دوران و یاتاقان باعث میرایی سیگنال لرزش میشود . از این رو در این وضعیت حسگرهای غیرتماسی نسبت به تماسی کاربری بیشتری دارند . - ارتعاشات مطلق محور دوران : عبارت است از حرکات سریع محور دوران نسبت به نقطه ثابت در فضا .
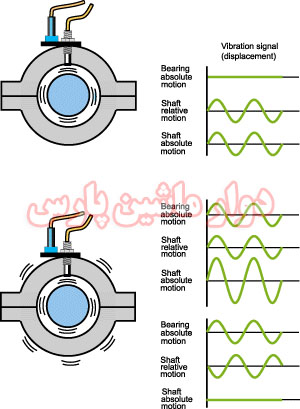
شکل ۵ نمایش سه نوع ارتعاشات