
موتور های پله ای چیست و انواع آن کدامند
مقدمه :
با پیشرفت روز افزون علم و فناوری همواره نیاز های جدید به وسایل و دستگاه های جدید تر جهت هماهنگی همه بخش های صنعت با این پیشرفت ، به وجود می آیند . بدین منظور شناخت و طراحی راه کارها و وسایل جدید امری است اجتناب ناپذیر از جمله این پیشرفت ها ساخت نوع جدید و پیشرفته تری از موتورهای الکتریکی به نام استپ موتور ها یا موتورهای پله ای است که با کاهش انواع هزینه ها در صناع کم کم جای مکانیزم های پیچیده مکانیکی را خواهند گرفت . در این مقاله سعی شده است تا بسیار مختصر و متناسب با محدودیت ها بزبانی ساده و قابل درک ساختار و نحوه کارکرد و کنترل موتورهای استپی بررسی و بیان شود .
آشنایی با موتور های پله ای :
یک استپ موتور وسیله ای الکتریکی است چرخش زاویه ای گسسته یا پله ای دارد و با اتصال به ضربان هایی در فرکانسی خاص کار می کند. هر ضربان فرستاده شده به موتور سبب حرکت محور موتور تا زاویه ای معین می شود که این زاویه ، زاویه استپینگ ( Stepping Angle ) نامیده می شود . کنترل دقیق ابزار های صنعتی،رباتها و بسیلری از سخت افزار های مکانینکی زیر بنا ساخت و تولید ابزارها و وسایل دقیق دیگر هستند. کارکردن با موتور های پله ای بسیار ساده و مفید است در این مقاله سعی شده است با زبانی ساده روشهای کنترل و راه اندازی موتورهای stepper در کنار معایب و مزایای استفاده از آن ها بررسی شود.
ساده ترین و متداول ترین نوع موتورها :
موتورهای dc معمولی اند که با نام آرمیچر معرفی میشوند . در این موتورها کافی است که دو سر موتور را به یک منبع ولتاژ متصل کنید تا موتور در جهت خاصی شروع به حرکت کند.برای عوض کردن جهت چرخش کافیست موتور را با پلاریته معکوس حالت قبلی به منبع متصل کنید. در این موتورها بعد از قطع کردن ولتاژ موتور، مدت زمانی طول میکشد تا موتور متوقف شود.فرض کنید قصد داریم،موتور بعد از ۲۰دور چرخش متوقف شود . شاید اولین راه حلی که به ذهن بسیاری از افراد برسد این باشد که،زمان لازم برای ۲۰ دور چرخش را محاسبه کنیم و به همان اندازه ولتاژ را به موتور اعمال کنیم.کافیست یکبار این کار را انجام دهید تا ببینید که این روش اصلا دقیق نیست و نمیتواند در حل مسائل واقعی مورد استفاده قرار بگیرد.
موتور های پله ای stepper
اما نوعی از موتورها که به موتور های پله ای stepper معروفند،میتوانند این مشکل را حل کنند . اولین تفاوتی که در ظاهر این موتورها وجود دارد این است که این موتورها بیش از دو سیم دارند.بسته به نوع موتور معمولا ۴، ۵یا ۶ سیم از این موتور ها خارج شده اند.اگر شفت این موتورها را با دست خیلی آهسته بچرخانید احساس میکنید که موتور پله پله یا گسسته حرکت میکند و حرکت پیوسته و یکنواختی ندارد برخلاف آرمیچر وقتی سر سیم هایی را که از این موتور خارج شدهاند را در دست بگیرید و شفت آنرا بچرخانید،میتوانید ولتاژ القایی را که ایجاد میشود را احساس کنید
در مورد موتورهای بزرگ این ولتاژ مکن است خیلی بزرگ باشد به دلیل زیاد بودن سیم پیج های این نوع موتورها معمولا این ولتاژ به حدی است که میتوانید به راحتی احساس می کنید که به شما شوک ضعیفی وارد میشود خواهید دید برای محافظت از مدارهای پله ای در برابر این ولتاژ القایی از دیود استفاده میشود .
انواع موتورهای پله ای :
موتور های پلهای را میتوان به ۳ دسته تقسیم کرد :
- موتور های پله ای مغناطیس دائم permanent magnet
- موتورهای پله ای با مقاومت مغناطیسی متغیر variable reluctance
- موتورهای هیبریدی hybrid که در واقع ترکیبی از دو حالت فوق میباشد.
نوع اول رایج تراست و کار با آنها ساده است،و خود شامل دو نوع موتور می باشد :
- موتورهای تک قطبی unipolar
- موتورهای دو قطبی bipolar
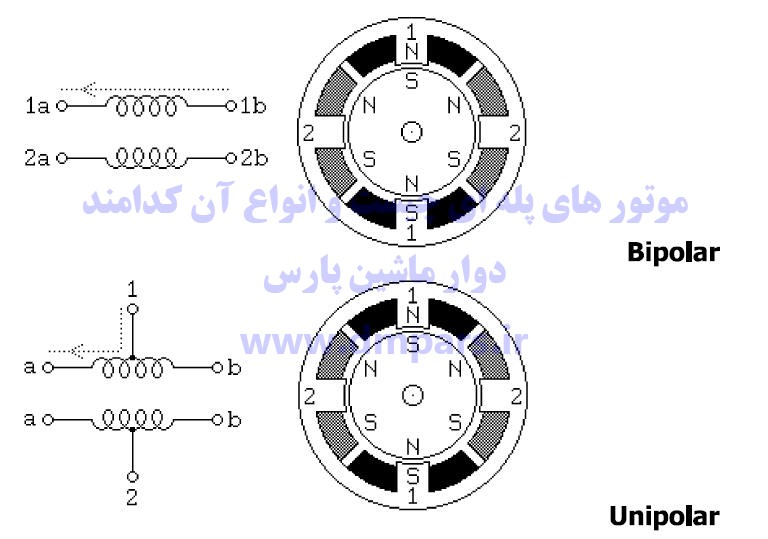
همانطور که در شکل میبینید، در نوع دو قطبی این موتورها ۴ ودر نوع تک قطبی آنها ۶ یا ۵ سیم از موتور خارج میشود . در شکل های زیر اساس کار یک موتور پله ای دوقطبی شرح داده شده است،با درک روش کار این موتور درک روشنی از نحوه کار موتورهای پله ای دیگر هم بدست خواهد آمد .

موتور های پله ای stepper
همانطور که در شکل مشخص است ،با اعمال ولتاژ به دو سر هر سیم پیچ،در هر مرحله،نحوه پلاریته آهنرباهای ایجاد شده طوری است که آهنربای مرکزی که شفت موتور به آن متصل است را ۹۰ درجه می چرخاند و تا زمانی که به همین حالت،ولتاژ به سیم پیچ اول متصل است،شفت نمیتواند بچرخد از این خاصیت برای قفل کردن موتور استغاده میشود حال با اعمال این ولتاژ به سیم پیج دوم پلاریته آهنربا طوری تغییر میکند که موتور ۹۰ درجه دیگر میچرخد،واین اعمال ولتاژ به سیم پیچ اول اما با پلاریته معکوس،دوباره موتور را ۹۰ درجه به جلو میبرد.
حال باید ولتاژ را به سیم پیچ دوم با پلاریته معکوس اعمال کرد تا باز هم موتور به جلو برود و با تکرار چهار مرحله فوق موتور شروع به چرخش میکند. این اساس کار یک موتور پله ای بسیار ساده بود که زاویه گام ۹۰ stepangle درجه دارد و با افزایش تعداد سیم پیچ ها و آنهربای دائم مرکزی میتوان به زاویه گام پایین تر نیز رسید, درحال حاضر موتورهایی ساخته شده است که زاویه گامی معادل ۰٫۷۲ درجه دارند .

مشخصات موتور پله ای :
چهار فاکتور عمده هستند که نوع یک موتور پله ای را مشخص میکنند :
- voltage موتور های پله ای با ولتاژ کارهای مختلفی ساخته میشوند،رایج ترین آنها ۲۴v , 12v, 5v است.همواره اعمال ولتاژ کمی بیشتر از ولتاژ نامی موتور برای آفزایش گشتاور در کارکرد بهتر موتور توصیه میشود.
- current مقدار جریانی که،وقتی موتور در حال کارکرد است در سیم پیچ ها جاری میشود.در ابتدای هر پله جریان بیشتری از سیم پیچ ها میگذرد.
- torque گشتاور موتور یکی از مهمترینعوامل در انتخاب یک موتور است , گشتاور موتور معرف مقدار ماگزیمم گشتاوری است که می توان به موتور اعمال کرد بدون اینکه حرکت دجار اختلال شود.
- stepangle زاویه گام زاویه ای است که شفت موتور با اعمال یک پالس طی میکند , زاویه گام معمولا بر حسب درجه بیان میشود , موتورهایی با زاویه گام ۹۰،۱۵،۷٫۵،۳٫۶،۱٫۸ و درجه ساخته شده اند.
از معایب موتور های پله ای این است که معمولا سرعت پایینی دارند و همواره افزایش سرعت موجب کاهش گشتاور موتور میشود شکل زیر موئد تغیرات گشتاور برحسب تغییرات سرعت است , با افزایش ولتاژ،گشتاورو جریان موتور افزایش می یابد .

راه اندازی موتورهای پله ای :
در واقع برای راه اندازی یک موتور پله ای نیاز به هیج مداری نیست.به عنوان مثال برای راه اندازی یک موتور پله ای تک قطبی کافیست دو سیم مثبت را به سر مثبت منبع متصل کنید و سر منفی منبع را به ترتیب به سیم های d،c،b،a موتور اتصال دهید.میبینید که موتور در جهت خاصی شروع به حرکت میکند.یعنی هر بار که سیم منفی را به پایه ای از موتور وصل کنید موتور یک پله به جلو میرود و تا زمانی که ولتاژ منفی را از آن سیم قطع نکرده اید،موتور روی همان پله قفل یشود.برای اینکه موتور به حرکت خود در یک جهت ادامه دهد،حتما باید سر منفی به سیم های وصل شود.در جدول زیر به ترتیب اعمال ولتاژ مثبت و منفی را برای موتورهای مختلف نشان میدهد.
این جداول معمولا در برگه راهنمای موتور وجود دارند :
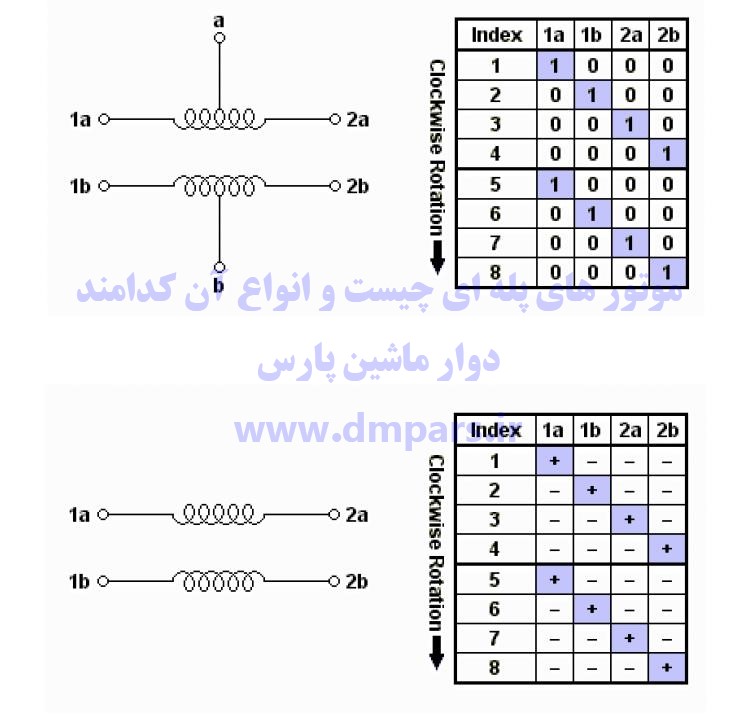
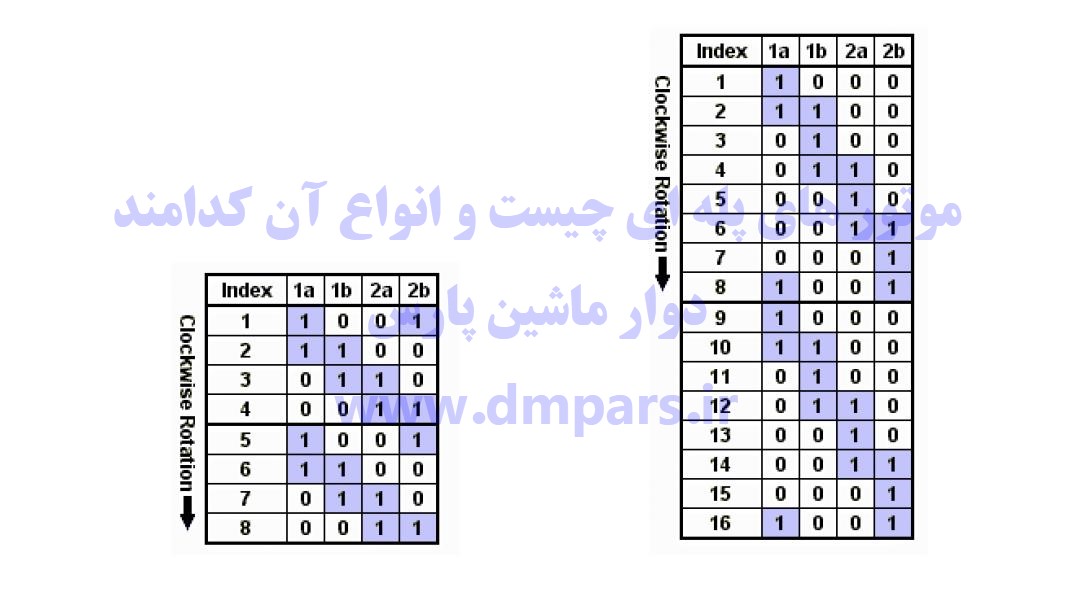
اگر پالس ها به ترتیب اعمال نشوند، موتور در هیچ جهت خاصی حرکت نمی کند و مرتبا تغییر جهت می دهد . در روش فوق به ازای هر پالس موتور یک پله به جلو میرود این روش Full Stepping ( تمام پله ) نام دارد،اما روشی به نام Half Stepping ( نبم پله ) وجود دارد که موتور را بع ازای هر پالس به اندازه نیم پله جلو میبرد.روش دیگری نیز برای افزایش گشتاور موتوردر حالت تمام پله وجود دارد. جدول زیر ترتیب اعمال پالس در این روشها را مشخص می کند .
همانطور که در شکل ها مشخص است برای تغییر جهت موتور کافیست ترتیب انجام مراحل وارونه باشد .
روش Micro Stepping
روش دیگری نیز به نام Micro Stepping برای کنترل موقعیت موتور وجود دارد . در این روش می توان فاصله بین دو پله را به چند قسمت تقسیم کرد و موتور را روی هر کدام از این موقعیت ها متوقف نمود و در واقع به زاویه گام بسیار کوچکتری رسید . در این روش نسبت جریانهای سیم پیچ ها تعیین میکند که موتور در چه موقعیتی باید متوقف شود و برای راه اندازی موتور به این روش میتوان از IC های LMD18245 و ۳۹۵۵ استفاده نمود .
نتیجه گیری درمورد موتور های STEPPER :
کارایی و امکانات یک استپ موتور بسیار بیشتر از انواع دیگر الکترو موتورها می باشد. بدین لحاظ که بسیاری مکانیزم ها و حالات مختلف چرخش را می توان از آنها گرفت و همچنین این که کنترل این موتور ها بسیار آسان تر از سایرین است به طوری که عمدتا به وسایل کنترل سرعت اضافی از قبیل ترمز های الکتریکی و مکانیکی نیازی ندارند .