تشخیص موقعیت ترک در شفت ترک دار
در این مقاله از سایت دوار ماشین پارس روشی غیر مخرب جهت تعیین فرکانس و تشخیص موقعیت ترک در یکی از مهمترین اجزای سازه های هوایی یعنی شفت ها، با استفاده از روش ماتریس انتقال ارائه شده است. این تحلیل فرکانسی در حالتی صورت گرفته که شفت ترک دار، فاقد سرعت دورانی می باشد. در این تحلیل از تئوری تیر تیموشنکو استفاده شده است. همچنین ترک به صورت باز مدل شده تا از رفتار غیر خطی آن صرفه نظر شود.
نتایج حاصل از این روش برای دو شفت متفاوت، یکی شفت ساده و دیگری شفت دارای دو دیسک و پله مورد بررسی قرار گرفته و فرکانس حاصل از شفت ترک دار با شفت بدون ترک مقایسه گردیده است که تاثیر ترک را روی تحلیل ارتعاشی شفت تیموشنکو نشان می دهد. همچنین به کمک ترسیم شکل مد برای شفت دارای پله و دیسک در دو حالت ترک دار و بدون ترک به ازای فرکانس طبیعی اول، موقعیت ترک نیز تشخیص داده می شود.
در پایان نتایج به دست آمده از روش ماتریس انتقال با نتایج تجربی برای شفتی دو سر مفصل و دارای لبه های آزاد مقایسه گردیده است که نشان دهنده ی دقت عالی روش ماتریس انتقال می باشد.
مقدمه تشخیص موقعیت ترک در شفت ترک دار ایستا
تقریبا همه سازه هایی که در صنعت هوا و فضا مورد استفاده قرار می گیرند دارای روتور نیز می باشند. یکی از عیب های اساسی روتورها که در صورت عدم تشخیص به موقع می تواند منجر به حوادث ناگوار گردد، ترک خستگی در شفت می باشد. موضوع روتور دارای ترک، اولین بار در سال ۱۹۷۰ آغاز شد. رفتار ارتعاشی ساختارهای دارای ترک، خصوصا روتورهای ترک دار در دو دهه اخیر بسیار مورد توجه قرار گرفته و مساله ی خسارت و تشخیص ترک در اجزاء ساختاری در سالهای اخیر نقش مهمی کسب کرده است.
شفت ترک دار
از آن جایی که در سازه های هوایی اینگونه خسارات تلفات جانی را نیز در بر دارد، لذا تشخیص زود هنگام عیب در این اجزا از اهمیت ویژه ای برخوردار است. محققان زیادی مدل های مختلفی از شفت ترک دار را مورد بررسی قرار داده اند تا تغییرات رفتار ارتعاشی ناشی از رشد ترک در شفت را مطالعه نمایند و راهی جدید و کاربردی تر برای جلوگیری از این خسارات ناگهانی پیش رو بگذارند.
در این تحقیقات عموما دینامیک روتور های ترک دار مورد توجه قرار گرفته است؛ مطابق آن چه در کتاب Dimarogonas و Pipetis شرح داده شده است.
برخی دیگر از کارهای صورت گرفته توسط محققان به صورت زیر می باشد:
Dimarogonas در مقاله ای کارهای صورت گرفته توسط سایر محققین را درباره ی ارتعاشات ساختارهای ترک دار مورد بررسی قرار داد.
Papadopoulos و Dimarogonas ، کوپلینگ ارتعاشات پیچشی و محوری را در شفت ترک دار دارای ترک عرضی سطحی بررسی کردند. آن ها ترک را به صورت باز در نظر گرفتند و انعطاف پذیری محلی ناشی از ترک را با یک ماتریس ۶*۶ برای ۶ درجه ی آزادی المان ترک دار شفت نمایش دادند و با صرفه نظر از اثر برش و در نظر گرفتن خمش در دو جهت اصلی و کشش، به ماتریس سختی ۳*۳ شامل جملاتی که بیانگر کوپلینگ بود، دست یافتند و پدیده ی حرکت کوپل شده ی عرضی و محوری را مورد مطالعه و بررسی قرار دادند.
کوپلینگ ارتعاشات خمشی
در همان سال Papadopoulos و Dimarogonas کوپلینگ ارتعاشات خمشی و پییچشی را برای شفت ترک دار تیموشنکو بررسی کردند. آن ها همچنین به بررسی ارتعاشات آزاد و اجباری و تاثیر ترک روی رفتار ارتعاشی شفت پرداختند و ارتباط بین مقادیر ویژه ی سیستم، عمق ترک و نسبت باریکی شفت را به دست آوردند.
در مقاله ای دیگر Papadopoulos و Dimarogonas ارتعاشات کوپل شده ی شفت های ترک دار را مورد بررسی قرار دادند. آن ها در مقاله ی خویش از تئوری تیر تیموشینکو استفاده نموده و ماتریس انعطاف پذیری ۶*۶ را برای شبیه سازی ترک به کار بردند.
Tsai و Wang ، رفتار ارتعاشی شفت ترک دار را به ازای موقعیت های گوناگون و عمق های مختلف ترک ترسیم نموده و روشی برای تعیین موقعیت و اندازه ی ترک عرضی باز روی شفت ساکن، بدون درگیر کردن آن با سیستم ماشین ارایه نمودند.
در سال بعد Tsai و Wang شفتی را مورد بررسی قرار دادند که دارای چندین ترک و سرعت دورانی بود. آن ها در مقاله ی خویش ترک ها را در مد اول و تحت زوایای گوناگون نسبت به یکدیگر در نظر گرفتند و از ترسیم اربیت ترک ها، به این نتیجه رسیدند که می توان زاویه دار بودن ترک ها نسبت به یکدیگر را نیز تشخیص داد.
Sabnavis و دیگران ، مروری بر مقالات انجام شده در زمینه ی تشخیص و تعیین ترک در شفت را ارایه نمودند.
خصوصیات ارتعاشی شفت ترک دار
Sekhar در مقاله ای خصوصیات ارتعاشی شفت ترک دار با دو ترک باز را بررسی نمود. وی به منظور تحلیل ارتعاشات خمشی شفت از روش المان محدود استفاده کرد و نیز تاثیر یک ترک روی ترک دیگر را برای فرکانس های ویژه، مد شیپ ها و محدوده های سرعت بحرانی نشان داد.
Gasch رفتار دینامیکی روتور لاوال با یک ترک عرضی را مورد بررسی قرار داد. وی در مقاله اش معادلات غیر خطی حرکت را به دست آورد و به علت غلبه ی وزن در تغییر مکان الاستیک افقی شفت این معادلات را در حالی به صورت خطی در آورد که با زمان تغییر می کردند.
ارتعاشات پیچشی شفت استوانه ای
Chondros و دیگران ارتعاشات پیچشی شفت استوانه ای با یک ترک پیرامونی را به دو روش تحلیلی دقیق و روش عددی تحلیل المان محدود بررسی نمودند. آن ها برای یافتن فرکانس های شفت ترک دار از خارج قسمت ریلی و برای به دست آوردن معادلات دیفرانسیل و شرایط مرزی آن شفت از فرمول تغییرات Hu-Washizu-Barr استفاده کرده و انعطاف پذیری مربوط به ترک را بر مبنای اصول مکانیک شکست مدل نمودند.
Sekhar در مقاله ای به کار های صورت گرفته توسط سایر محققین اشاره کرد و تاثیر ترک های چندگانه را روی تیر ها و شفت ها مورد بررسی قرار داد و نیز روش های صورت گرفته توسط سایر محققین را به منظور تعیین ترک ارایه نمود.
موقعیت یابی ترک
Seibold و Wienert، موقعیت یابی ترک در ماشین های دوار را بر اساس ارتعاشات اندازه گیری شده شرح دادند و به این منظور از الگوریتم شناسایی دامنه ی زمانی(بسط فیلتر-کالمن) استفاده کردند.
Bachschmid و دیگران روشی را برای تعیین موقعیت و عمق ترک عرضی در سیستم یک روتور با استفاده از اندازه گیری های ارتعاشی ارائه نمودند. آن ها از تقریب تشخیص بر مبنای مدل و روش حداقل مربعات در دامنه ی فرکانسی استفاده کردند تا موقعیت ترک را در امتداد روتور تعیین کنند. آن ها همچنین عمق ترک را از مقایسه ی ممان خمشی ایستا ناشی از وزن روتور و شرایط راستای یاتاقان با ممان خمشی معادل تعیین شده که متناوب بود، محاسبه کردند.
محاسبه ی انعطاف پذیری معادل برای ترک باز
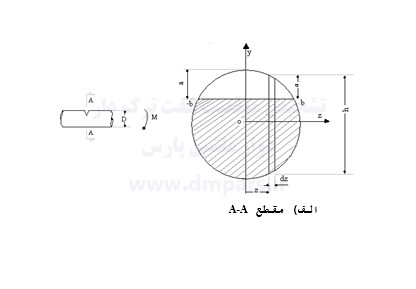
Dimarogonas و Pipetis با به کار بردن تیوری کاستیگلیانو، ماتریس انعطاف پذیری محلی ۵*۵ را برای تیر مقطع مستطیلی که دارای ترکی عرضی با عمق یکنواخت بود، به دست آوردند. در روابط به دست آمده، انعطاف پذیری محوری و خمشی با یکدیگر کوپل شده بود و از طرفی این نتیجه حاصل گردید که اگر ممان خمشی بر تیر غالب باشد، جملات کوپلینگ قابل چشم پوشی هستند. در تحقیق کنونی ممان خمشی از اهمیت بیشتری برخوردار است و لذا فقط انعطاف پذیری متناظر با آن در نظر گرفته می شود. برای یک شفت مدور همانطور که در شکل ۱ نشان داده شده است، عمق ترک ثابت نیست اما می توان انعطاف پذیری حاصل از آن را به روش مشابهی به دست آورد.
شفت نشان داده شده در شکل ۱، دارای قطر و ترک عرضی با عمق ماکزیمم می باشد. ماتریس انعطاف پذیری محلی ترک به ازای ممان خمشی در جهت به صورت به دست می آید :

۱ – نسبت پواسان، مدول یانگ و تابع هندسی چنین است

۲ – ارتعاشات آزاد شفت
با به کار بردن اصل همیلتون معادلات اویلر – لاگرانژ برای تیر تیموشنکو به صورت زیر به دست می آید :
(۳a,b)
علامت نقطه، اشاره به دیفرانسیل نسبت به زمان دارد و علامت پرایم بیانگر دیفرانسیل نسبت به x می باشد. Y تغییر مکان عرضی خط مرکزی تیر، شیب منحنی تغییر مکان ناشی از خمش، A سطح مقطع، چگالی ماده، I ممان اینرسی، G مدول برشی و k ضریب برشی تیموشنکو می باشد که می تواند به صورت تابعی از نسبت پواسان نوشته شود. حال می توان معادله ی (۳) را فقط بر حسب Y نوشت. در این صورت معادلات (۳) به شکل زیر در می آید :

حال از روش جداسازی متغیرها به صورت زیر استفاده می کنیم :
(۶a,b)
تشخیص موقعیت ترک در شفت ترک دار ایستا
حل عمومی معادله ی (۷) به شکل زیر است :
به طور مشابه برای معادله ی (۵) برای شیب منحنی تغییر مکان خواهیم داشت :
ماتریس های انتقال
در این کار دو نوع ماتریس انتقال مورد استفاده قرار می گیرد . یکی که به عنوان ماتریس المان شناخته می شود از مقادیر پارامترها در انتهای سمت راست المان یکنواخت شفت بر حسب مقادیرش در انتهای سمت چپ المان حاصل می گردد. نوع دیگر ماتریس انتقال، ماتریس مفصلی است که در واقع ارتباط دهنده ی دو ماتریس المان مجاور به یکدیگر می باشد و به عبارت دیگر فقط مقادیر پارامتر سمت راست مفصل را به مقادیر سمت چپ مفصل مرتبط می سازد.
الف – ماتریس انتقال المان
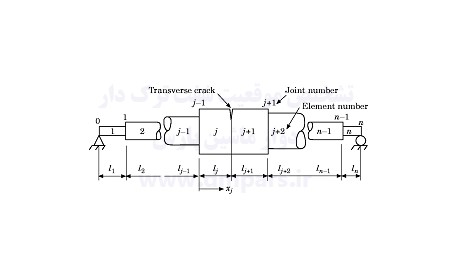
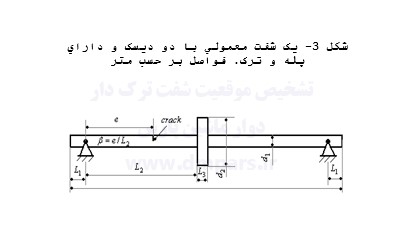
شفتی پله ای ، دارای یک ترک را مطابق شکل ۲ در نظر بگیرید. حل عمومی برای هر المان دلخواه مثلا المان j ام، تحت ارتعاشات آزاد می تواند به صورت زیر نوشته شود :
حال فرض می کنیم :

که در این رابطه داریم :

جایگزینی معادلات (۱۹) در معادله ی (۱۷) نتیجه می دهد :
![]()
ب- ماتریس انتقال مفصل
در این بررسی شفت های دوار نیز دو نوع ماتریس انتقال مربوط به قسمت های مفصلی یافت می شود.
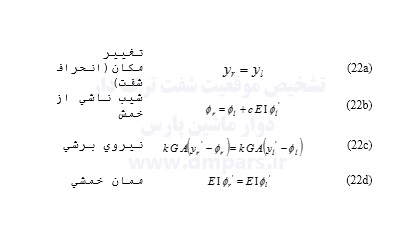
• مفصل ناشی از ترک
همانطور که در بحث قبلی شرح داده شد، مفصل ناشی از ترک به صورت انعطاف پذیری محلی ای مدل گردید که می توانست ضرورتا به صورت یک فنر خمشی در نظر گرفته شود. با توجه به این نکته که در این مفصل باید پیوستگی داشته باشیم، شرایط زیر باید ارضا شود :
(۲۲a)
که در آن C ماتریس انتقال مربوط به ترک می باشد.
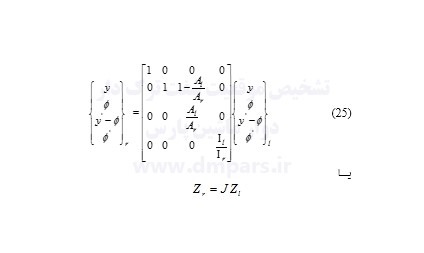
• مفصل پله ای
اساسا پارامترهای مربوط به دو طرف مفصل پله ای باید پیوسته باشند، به جز برای ناحیه ی سطح مقطع. بنابراین شرایط زیر باید ارضاء شود :
بنابراین شرایط پیوستگی شیب خمشی به جای شیب کل به دست می آید. با نوشتن این روابط به شکل ماتریسی داریم :
در این رابطه J ماتریس انتقال مفصل پله ای است.
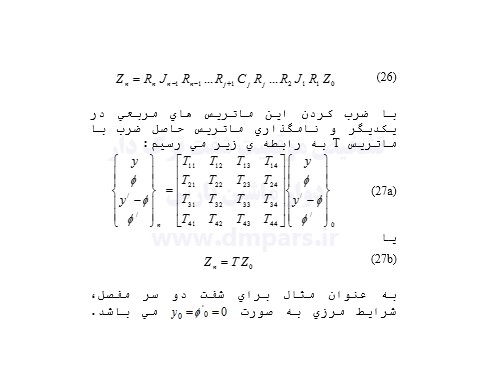
معادله فرکانسی
برای شفت پله دار و ترک دار نشان داده شده در شکل ۲ از ضرب کردن ماتریس های انتقال به دست آمده برای المان، ترک و پله می توان به معادله ی فرکانسی دست یافت. در واقع بدین گونه می توان پارامتر Zn انتهای سمت راست شفت را به پارامتر Z0 مربوط به انتهای سمت چپ شفت ارتباط داد. در این صورت داریم :

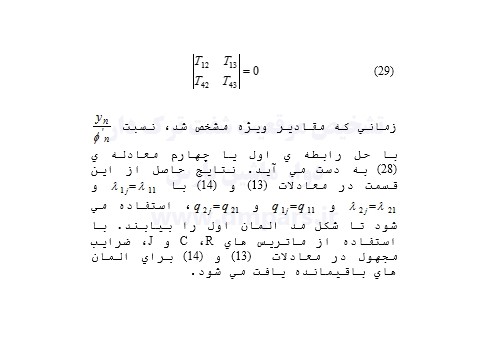
با اعمال این شرایط در معادله ی (۲۷) خواهیم داشت :

(۲۸)همچنین شرایط مرزی انتهای راست شفت چنین است: . با استفاده از این شرایط در معادله ی (۲۸) به یک دستگاه معادله ی همگن می رسیم. بنابراین دترمینان زیر معادله ی فرکانسی خواهد بود:
تحقیق و بحث مثال عددی
یک شفت فولادی دو سر مفصل با سطح مقطع یکنواخت را در نظر بگیرید. مشخصات این شفت عبارت است از :
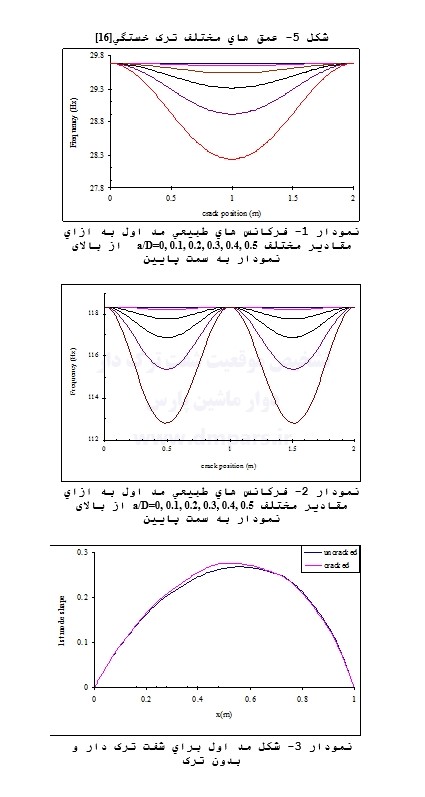
نتایج حاصل از این تحلیل فرکانسی برای دو فرکانس طبیعی اول به دست آمده است(مطابق نمودارهای ۱ و ۲). همانطور که در این نمودارها مشاهده می شود هر چه عمق ترک افزایش یابد، افت فرکانس طبیعی بیشتر خواهد بود. لازم به ذکر است که در نمودار ۲ در صورتی که ترک در موقعیت گرهی نمودار قرار گیرد، در همان مد فرکانسی تغییری روی فرکانس نشان نخواهد داد و به عبارت دیگر در این هنگام حضور ترک در مد به خصوصی قابل تشخیص.
تشخیص ترک و شناسایی
همانطور که شرح داده شد اگر ترک در ناحیه ی گرهی یک مد خاص و یا نزدیک به آن قرار داشته باشد، تشخیص ترک و شناسایی آن دشوار می گردد. به منظور بررسی این موضوع شفت مربوط به شکل ۳ را در نظر می گیریم. می خواهیم تاثیر ترک در این شفت را که دارای دو دیسک، چند پله و یک ترک که در قسمت نواحی نزدیک به وسط شفت قرار گرفته، مورد بررسی قرار دهیم. مشخصات این شفت مانند شفت بدون پله با سطح مقطع ثابت می باشد. به این منظور ابتدا همین شفت را در حالتی در نظر می گیریم که فاقد ترک باشد. لازم به ذکر است که ترک در موقعیت قرار گرفته و انعطاف پذیری مربوط به آن به ازای محاسبه شده است.
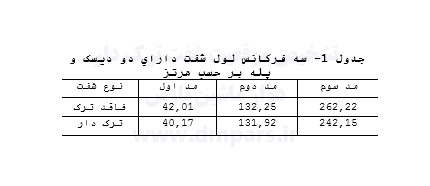
نتایج حاصل از این بررسی ها در جدول ۱
با حل معادله ی حاکم بر این شفت در دو حالت سالم و معیوب، فرکانس های آن در دو حالت به دست می آید. نتایج حاصل از این بررسی ها در جدول ۱ به نمایش گذاشته شده است. همانطور که مشاهده می شود، اختلاف بین فرکانس مربوط به مد دوم در شفت سالم و معیوب در مقایسه با مد اول و سوم بسیار ناچیز است. دلیل این امر، قرار گرفتن ترک در نواحی میانی شفت است که با توجه به نمودار ۲، نزدیک نقطه ی گرهی مد دوم می باشد.
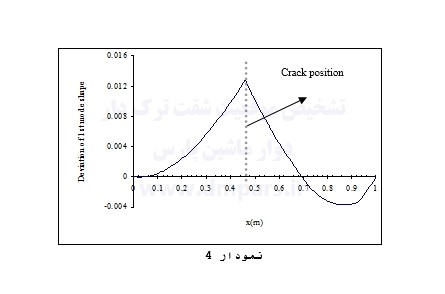
بنابراین در این مواقع بهتر است مدهای بیشتری مورد بررسی قرار گیرند. در ادامه مد شیپ متناظر با فرکانس طبیعی اول برای این شفت در دو حالت سالم و معیوب ترسیم گردیده است که از اختلاف این دو شکل مد، نموداری حاصل می گردد که دارای تغییرات شدید است. نقطه ای که به صورت نوک تیز است، نشان دهنده ی موقعیت ترک می باشد.
مقایسه با داده های تجربی
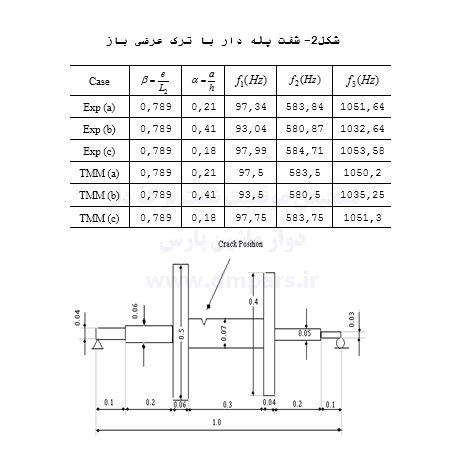
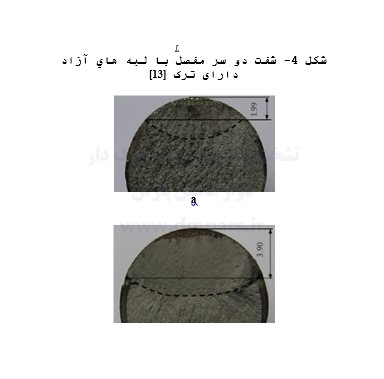
همچنان که در شکل ۳ مشاهده می شود، آزمایشی تجربی بر روی شفتی دو سر مفصل و فاقد سرعت دورانی به منظور تعیین سه فرکانس طبیعی اول صورت گرفته است که جنس آن از فولاد ۴۰cr می باشد. در این آزمایش از Doppler signal laser vibrometer برای تعیین فرکانس ها استفاده شده است. مشخصات این شفت به صورت زیر می باشد :
در این آزمایش ترک به صورت ترک خستگی مدل شده و با عمقی معین در موقعیتی ثابت بر روی شفت قرار گرفته است. نتایج حاصل از این آزمایش و نیز نتایج حاصل از روش ماتریس انتقال برای این شفت دو سر مفصل دارای لبه های آزاد به ازای سه عمق متفاوت (مطابق شکل ۵) در جدول ۲ آمده است که نشان دهنده کارایی بالای روش ماتریس انتقال می باشد .
نتیجهگیری
در این مقاله آنالیز فرکانسی چند نوع شفت مختلف ترک دار که ترک آن ها به صورت باز مدل شد، ارائه و شفت از نوع تیر تیموشنکو در نظر گرفته شد. در شفت ساده (بدون دیسک یا پله)، فرکانس های طبیعی شفت ترک دار به روش ماتریس انتقال بر پایه تحلیل نرمی محلی برای ترک به ازای دو مد مختلف و با قرار گیری ترک در موقعیت های مختلف در طول شفت و از طرفی به ازای عمق های متفاوت ترسیم گردید. نتایج بیانگر این نکته بودند که افت فرکانس یکی از علایم تشخیص ترک است و از طرفی هر چه عمق ترک بیشتر باشد، افت بیشتری در فرکانس خواهیم داشت. همچنین در صورتی که ترک در نقطه ی گرهی یکی از مدها و یا در نزدیکی آن باشد، تغییرات ناچیزی روی فرکانس خواهد داشت .
تحلیل فرکانسی شفت دارای
همچنین تحلیل فرکانسی شفت دارای دو دیسک و پله انجام شد و پس از به دست آوردن فرکانس های اولیه ی این شفت، شکل مد آن در دو حالت ترک دار و بدون ترک ترسیم گردید که از تفاضل این دو شکل مد، موقعیت ترک تشخیص داده شد. همچنین به منظور تایید نتایج فرکانسی به دست آمده از روش ماتریس انتقال، این نتایج با نتایج تجربی برای شفت دو سر مفصل با لبه های آزاد مقایسه گردید که بیانگر دقت بالای روش ماتریس انتقال می باشد .
شکل و نمودار ها